Make an Obstacle Avoiding Robot for kids
Overview
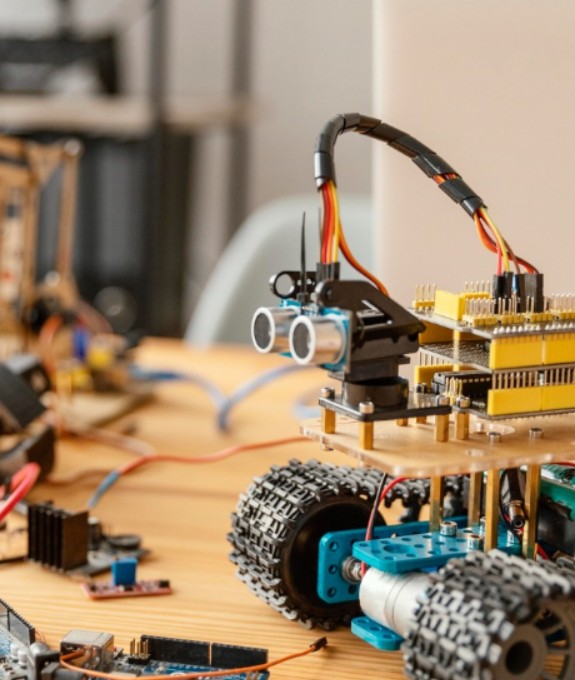
This project is about obstacle obstacle-avoiding robot. In this robot, it will calculate the distance from the obstacles and make it move forward, backwards, right and left.
In this obstacle-avoiding robot, if the ultrasonic sensor senses any obstacle, it will give input to the hobby generator, and it will move accordingly. If the slide switch is OFF, then the motor will not work.
Hardware required
- Arduino Uno R3
- Jumper Wires
- L293D
- Hobby generator
- Slide Switch
- Ultrasonic Sensor
Schematic Diagram

Fig 1. Circuit Diagram
Arduino Code :
const int trigPin=13;
const int echoPin=12;
int enableA=8;
const int motorPin1=3;
const int motorPin2=5;
int enableB=9;
const int motorPin3=4;
const int motorPin4=2;
const int slideSwitch=7;
int duration;
int distance;
void setup()
{
pinMode(enableA,OUTPUT);
pinMode(enableB,OUTPUT);
pinMode(motorPin1,OUTPUT);
pinMode(motorPin2,OUTPUT);
pinMode(motorPin3,OUTPUT);
pinMode(motorPin4,OUTPUT);
pinMode(trigPin,OUTPUT);
pinMode(echoPin,INPUT);
pinMode(slideSwitch,INPUT_PULLUP);
analogWrite(enableA, 200);
analogWrite(enableB, 200);
Serial.begin(9600);
}
void loop()
{
if(digitalRead(slideSwitch) == LOW){
findDistance();
if(distance<=10){
//The robot will stop for a while
rightMotor(0);
leftMotor(0);
delay(200);
//The robot will move backward
rightMotor(-255);
leftMotor(-255);
delay(300);
//The robot will turn towards the right
rightMotor(255);
leftMotor(-255);
delay(200);
}
else{
//The robot will move forwards
rightMotor(255);
leftMotor(255);
}
}
//Since the Slide Switch is off, the robot will not move
else{
rightMotor(0);
leftMotor(0);
}
}
void rightMotor(int speed)
{
analogWrite(enableB,speed);
if(speed>0){
digitalWrite(motorPin3,HIGH);
digitalWrite(motorPin4,LOW);
}
else if(speed<0){
digitalWrite(motorPin3,LOW);
digitalWrite(motorPin4,HIGH);
}
else{
digitalWrite(motorPin3,LOW);
digitalWrite(motorPin4,LOW);
}
}
void leftMotor(int speed)
{
analogWrite(enableA,speed);
if(speed>0){
digitalWrite(motorPin1,HIGH);
digitalWrite(motorPin2,LOW);
}
else if(speed<0){
digitalWrite(motorPin1,LOW);
digitalWrite(motorPin2,HIGH);
}
else{
digitalWrite(motorPin1,LOW);
digitalWrite(motorPin2,LOW);
}
}
void findDistance(){
digitalWrite(trigPin,LOW);
delayMicroseconds(2);
digitalWrite(trigPin,HIGH);
delayMicroseconds(10);
duration=pulseIn(echoPin,HIGH);
distance=duration*0.0345/2;
Serial.println(distance);
}
Precautions
- Connections should be done properly.
- Arduino is case Sensitive, so code accordingly.
- Give different and appropriate colours to the wires.
Conclusion
In this project, we successfully built an obstacle-avoiding robot using an Arduino Uno, an ultrasonic sensor, an L293D driver, and a slide switch. The robot is capable of detecting obstacles in its path and responding by stopping, backing up, or turning away as needed. Such a system demonstrates how robotics and electronics can come together to achieve simple autonomous behaviour.
Special thanks to the guidance and learning framework provided by Coding School. Their hands-on approach and resourceful mentorship have been invaluable in understanding fundamentals such as sensor interfacing, motor control, and real-time programming with Arduino. Working through this project under their teaching has enhanced both my technical skills and problem-solving mindset.